Transcription Methods
Transcribing optimal control problems (OCPs) into large but sparse nonlinear programming problems (NLPs).
Imperial College London Optimal Control Software
(pronounced 'eye-clocks')
Your One-Stop-Shop Solution for Optimization Based Control in Matlab/Simulink
Transcribing optimal control problems (OCPs) into large but sparse nonlinear programming problems (NLPs).
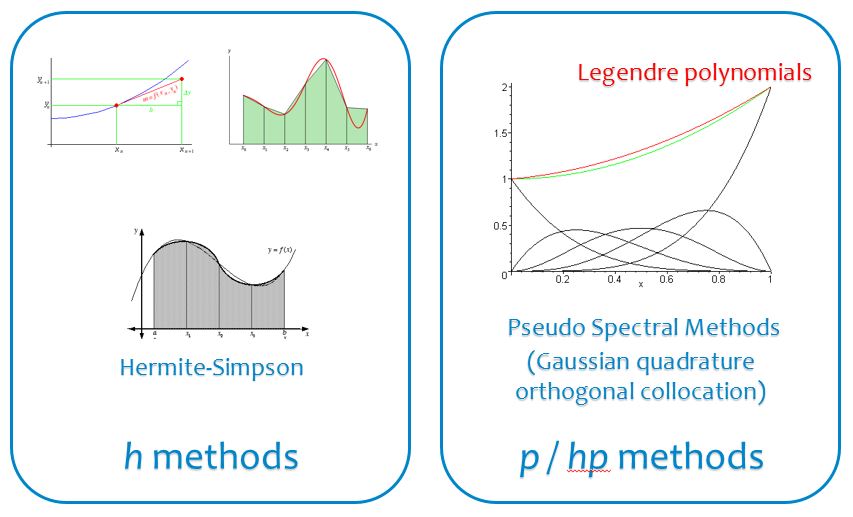
A wide choice of numerical discretization methods for fast convergence and high accuracy.
Choose your favorate NLP solver for robustly solving ill conditioned problems and faster warm start.
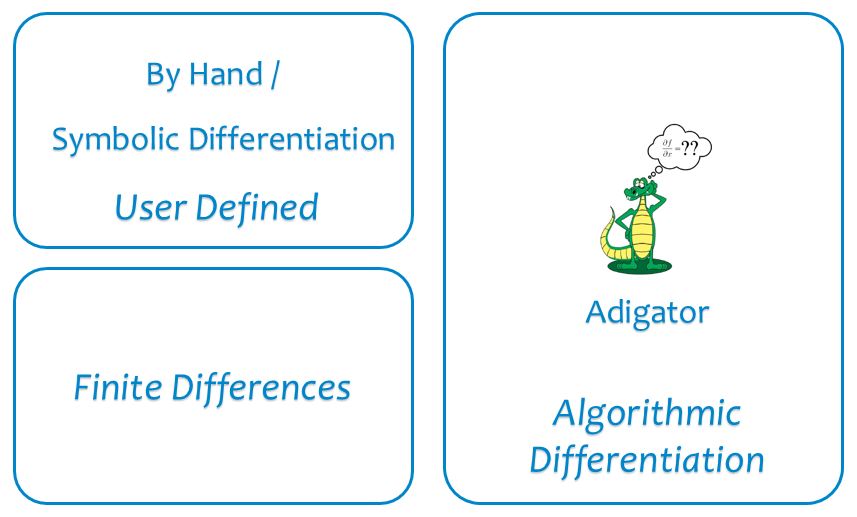
Flexible way of suppling derivative information via analytical and numerical means.
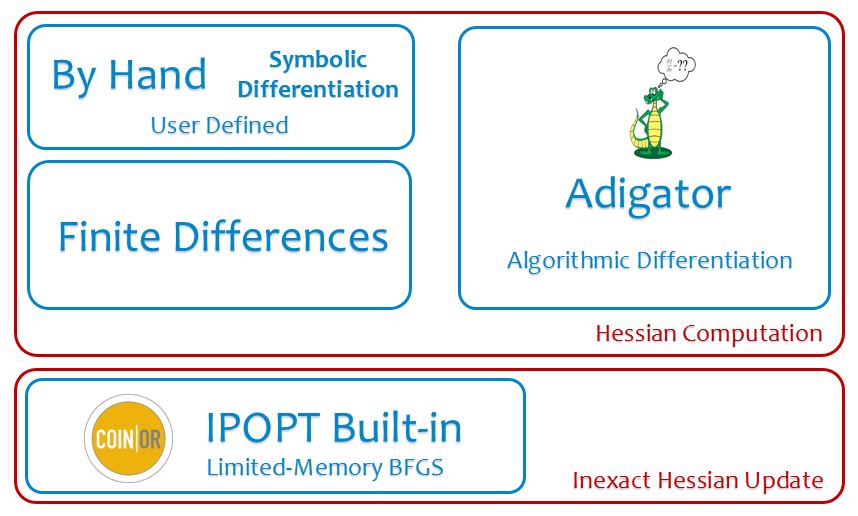
Flexible way of suppling derivative information via analytical and numerical means.
Support nonlinaer and non-regulation implementations (e.g. economic MPC, multi-step MPC).
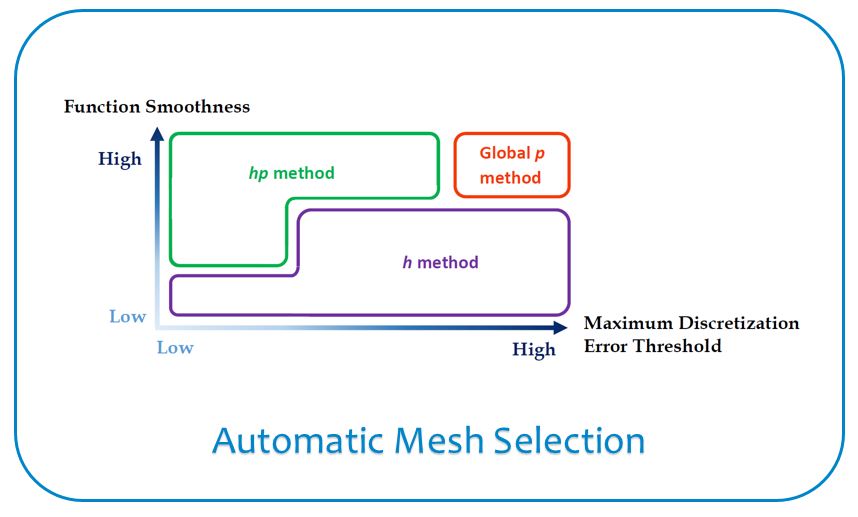
Automatic selection of descretization and meshing method depending on the problem nature.
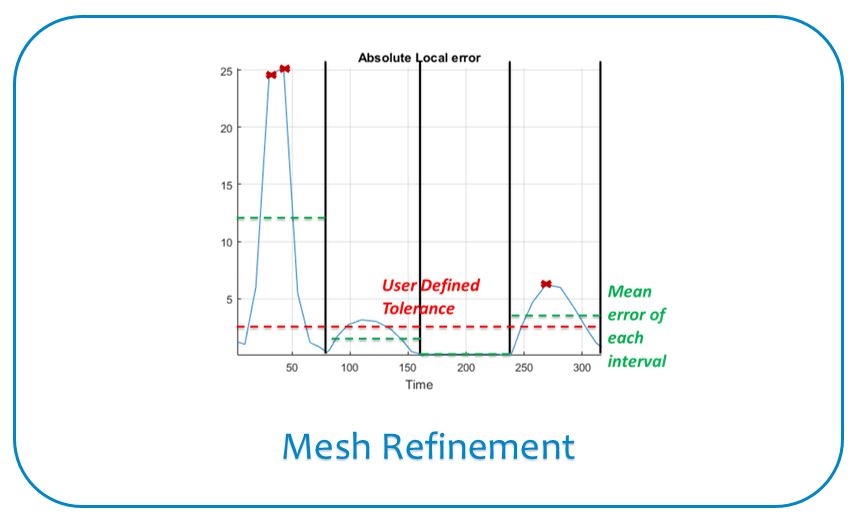
Efficient mesh refinment schemes to efficiently solve the problems to the required accuracy.
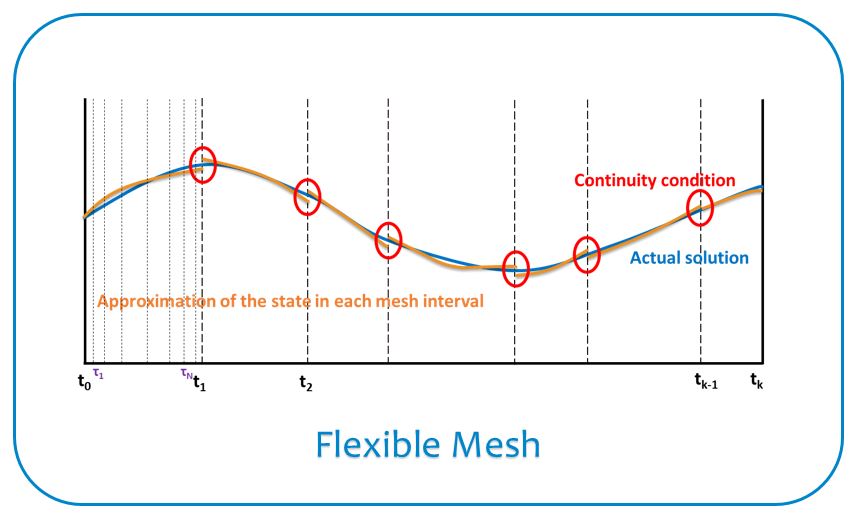
Automatic capturing of discontinuities in the solution for better accuracy with the flxible hp mesh.
Flexible construction of continuous time solutions guaranteeing accuracy and constraint satisfaction.
ICLOCS2 provides a first port of call to solve OCPs of different natures, with minimum requirements on the experience of the user. Other OCP solvers might be faster on some problems, but ICLOCS2 might work where others fail.
See how we did it then you can implement your problems in no time.
Difficulty: Easy
A problem with simple dynamics and simple bounds (box constraints) on the variables. Best suited for getting started.
Difficulty: Intermediate
Relatively simple dynamics with the need to implmenment path and boundary constraints.

Difficulty: Hard
Use of more realistic flight mechanics models, performance data and senario designs.
