Example: UAV relay
Will be added later
Will be added later
This example has already been implemented in ICLOCS2 for you. Use the link below to download it directly and feel free to use it as a starting point to formulate your own optimal control problem.
More complicated nonlinear dynamics for chemical engineering.
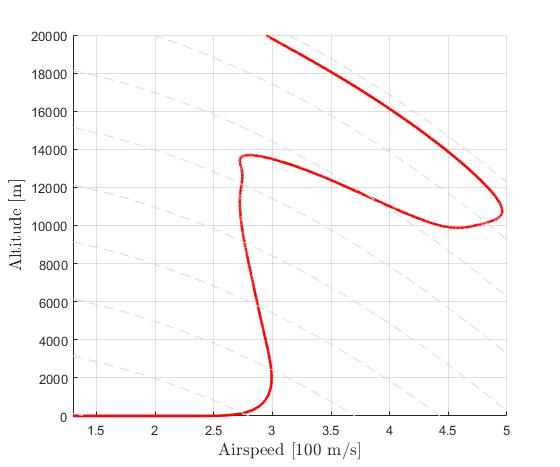
Simple nonlinear dynamics with additional path and boundary constraints.
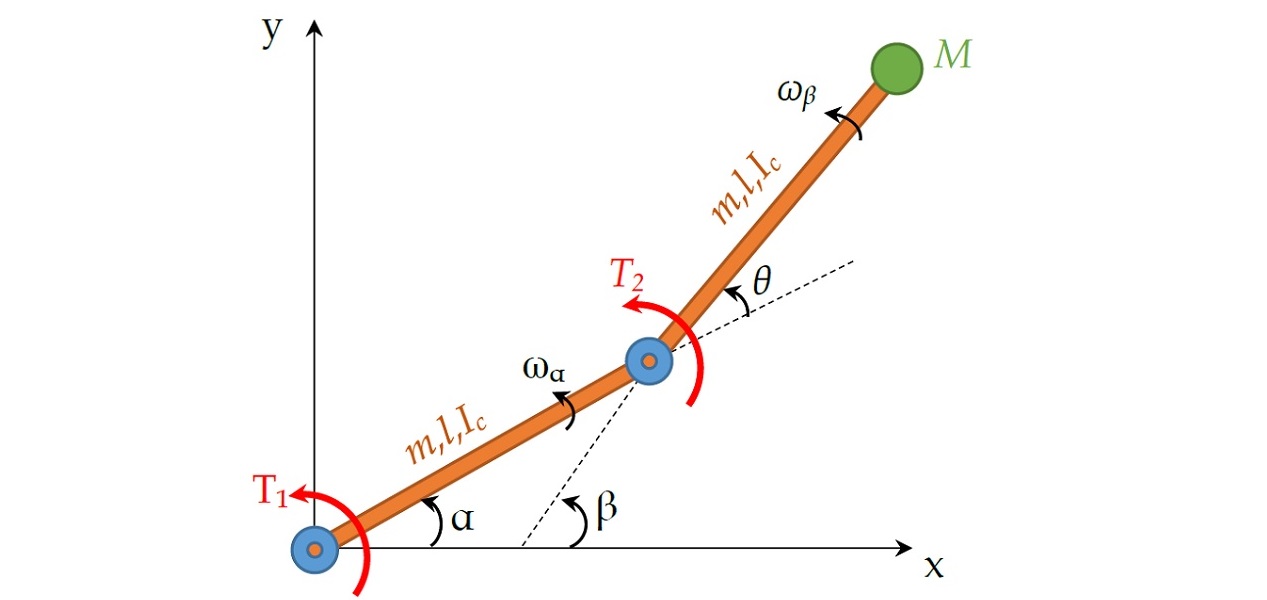
More complicated nonlinear dynamics for robotics.
Optimal control offers unconventional solutions.
Intuitively simple but handling discontinuities can be difficult.
